Path Following
Car
The objective of this project was to explore Arduino and feedback loops by
encoding a PID controller to navigate the car through a blackline track.
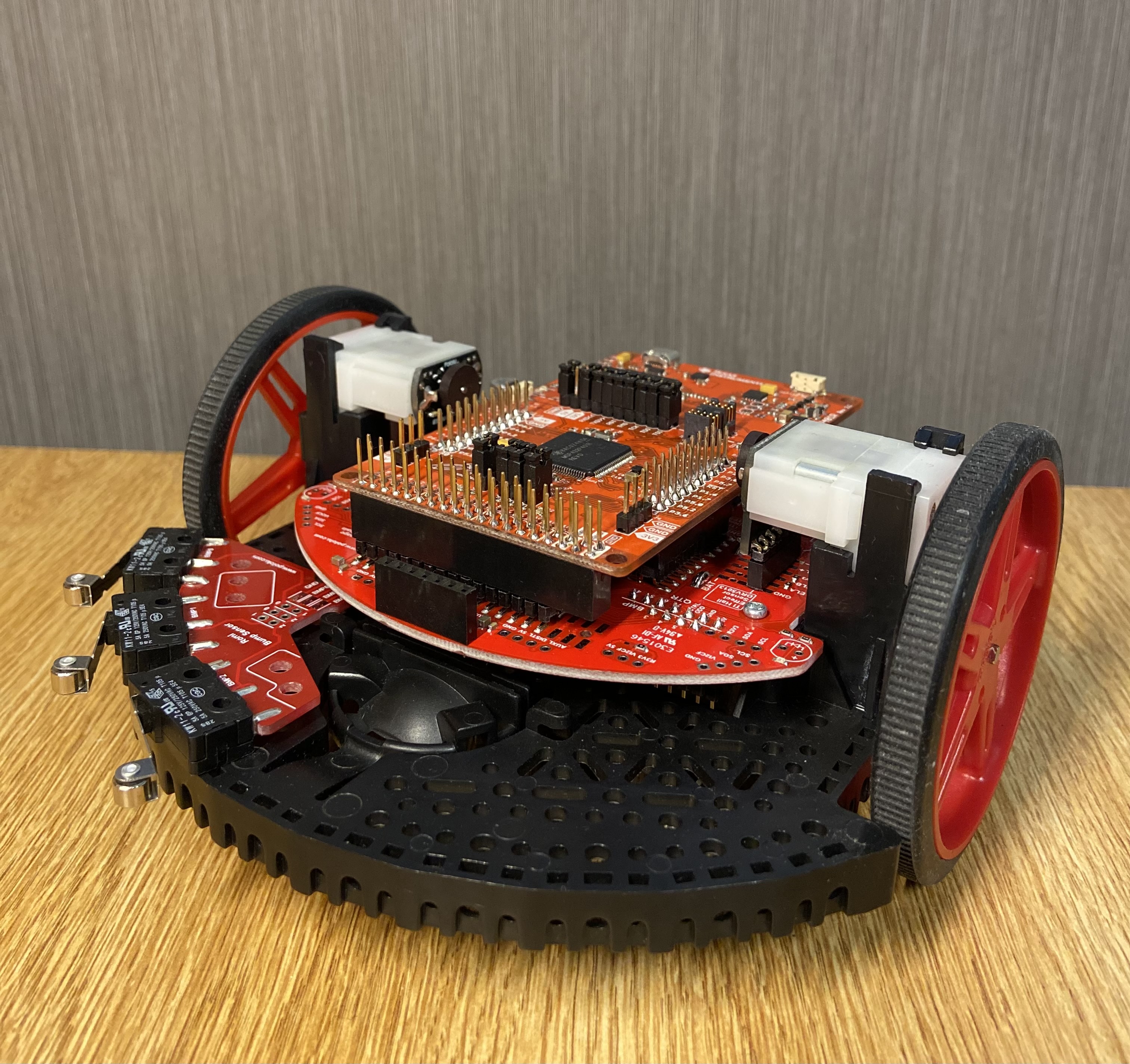
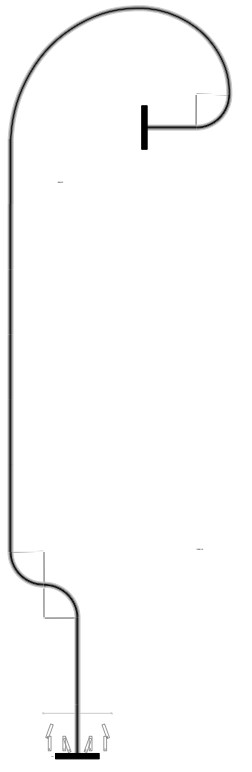
The car shown above reads input through a series of 8 IR LED's and phototransitors. When the car is over a black section of the course, most of the IR gets absorbed, leaving our phototransistors with little light to read in. This feedback enbales us to tune the motor speeds depending on which sensors are seeing black. Here, we implement Proportional and Derivative controls (not integral) to follow the black line as closely as possible. The result, is a control system that can correct itself from various starting positions (indicated by the small boxes), reach the end of the course and return.